

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
Dronepad
Projet soutenu dans le cadre du domaine d’études de Master Architecture et Pratiques Pour l’Innovation durant mon année de Master 1 à l’Ecole Nationale Supérieure d’Architecture de Lyon.
Dronepad est un projet prospectif, proposition de réponse à des interrogations sur le développement croissant des drones, de leurs usages potentiels et de leurs liens avec l’architecture et les nouvelles technologies.
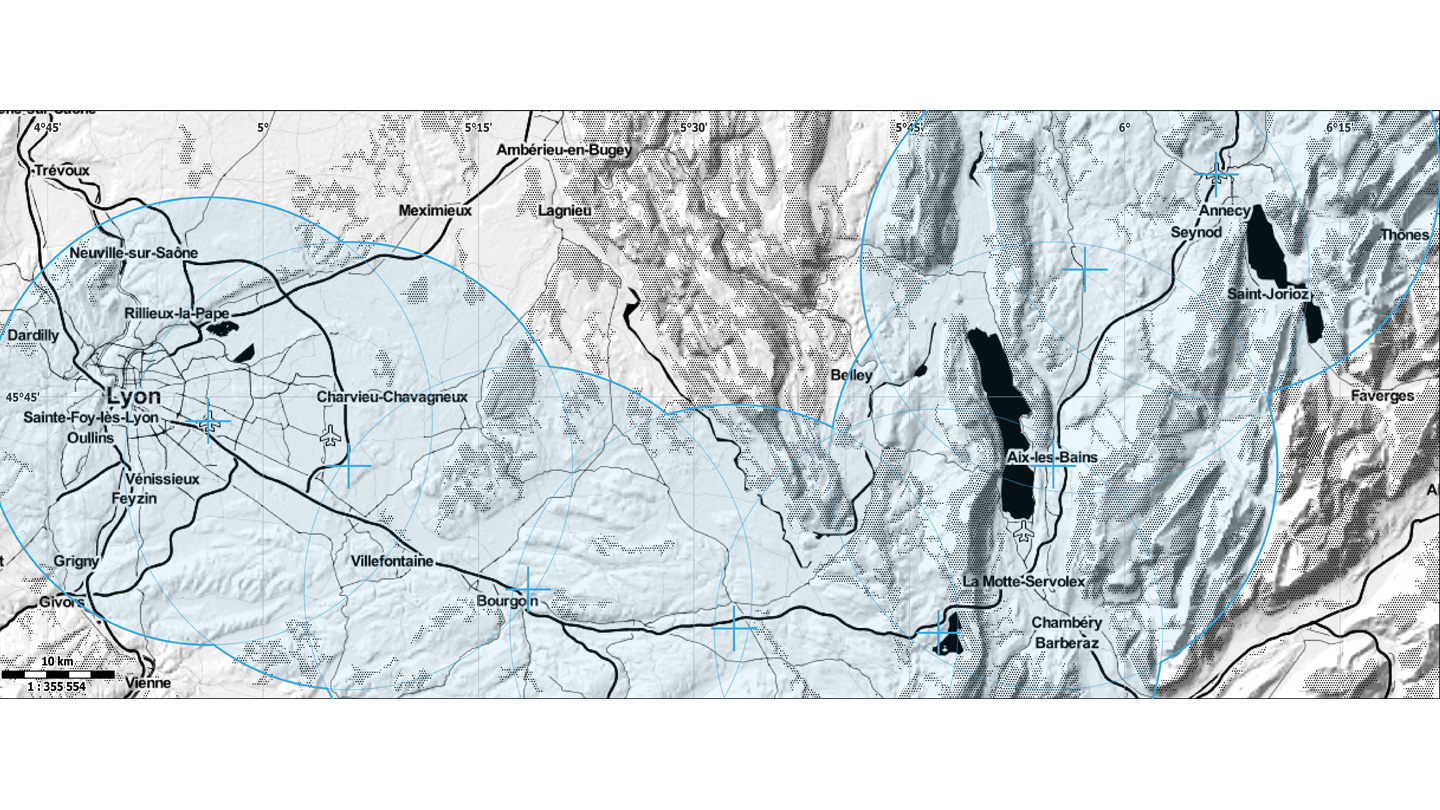
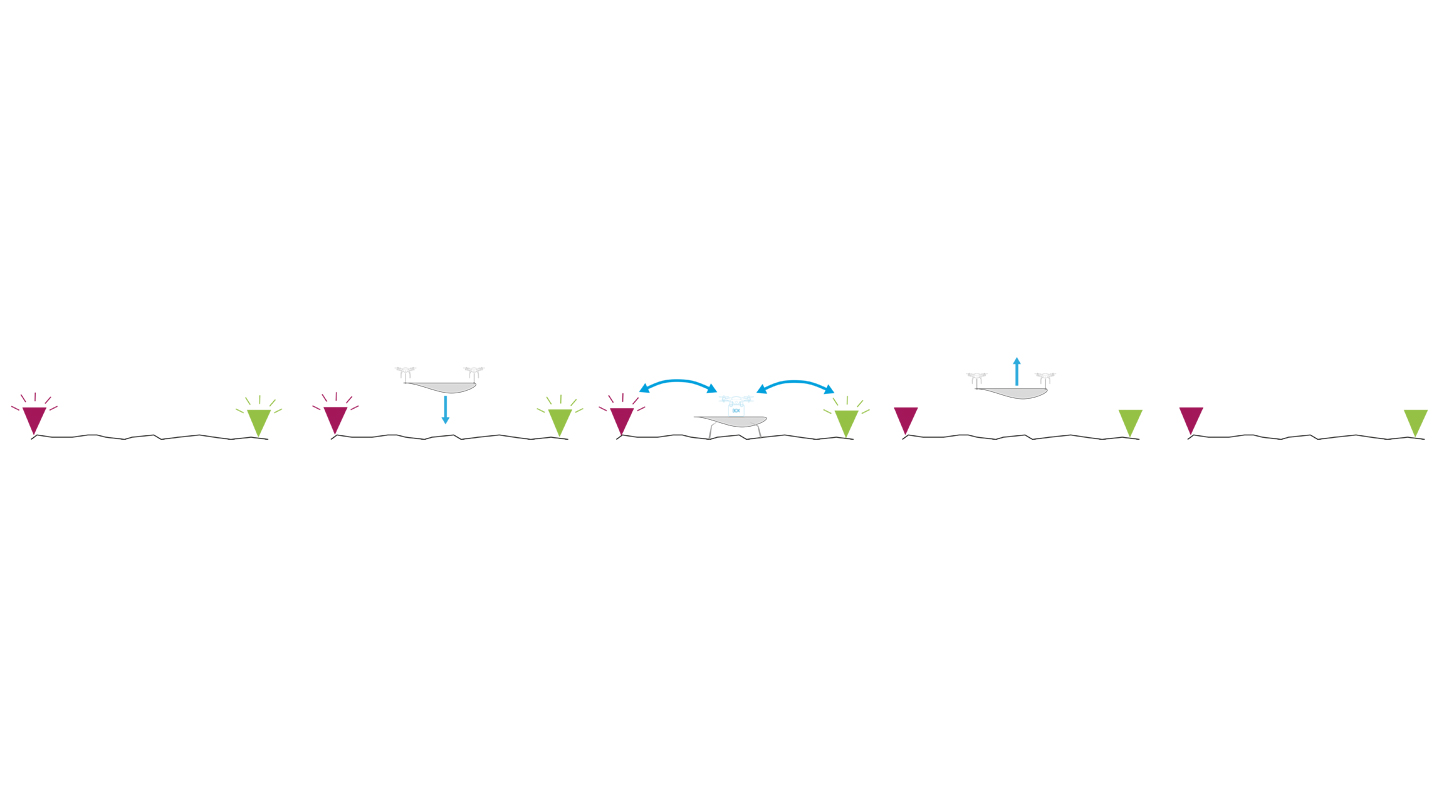
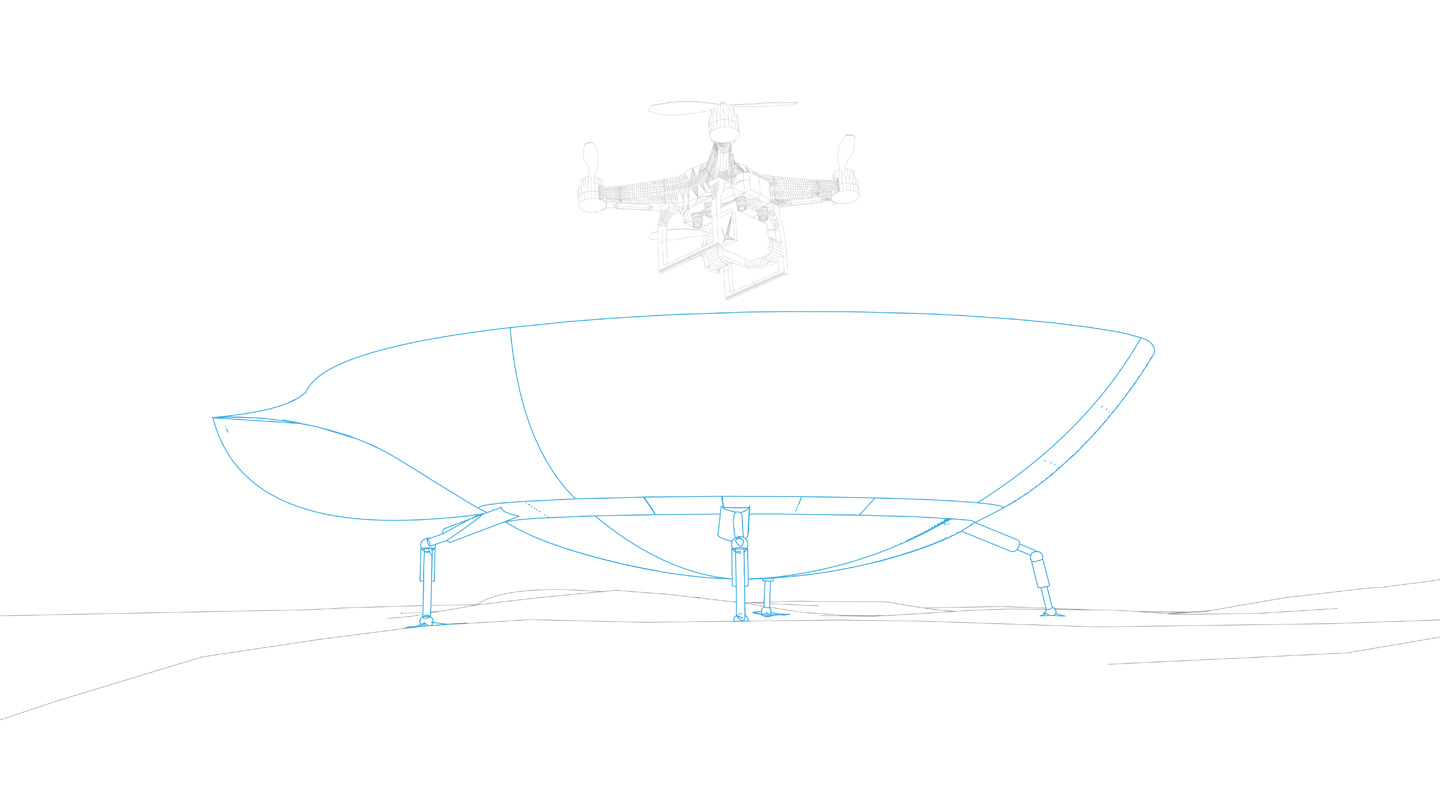
Le projet part du postulat – aujourd’hui éprouvé – que l’usage des drones autonomes et/ou préprogrammés va se démocratiser pour des opérations de livraison ou d’assistance dans des zones difficiles d’accès ou hostiles (à la suite de catastrophes naturelles par exemple). Or ces aéronefs sont tributaires d’une source d’énergie de type batterie d’une autonomie maximale moyenne en charge d’environ 25 min pour les plus performants (en 2014, année de développement du projet). L’idée est donc d’augmenter le rayon d’action de ces drones grâce à un réseau mobile et déployable de bases de recharge totalement autonomes, des Dronepad.
Dans une échelle restreinte permettant un déploiement et un transport efficace, ces micro-architectures abritent des systèmes automatisés permettant de remplacer et recharger les batteries des drones, d’effectuer des réparations courantes et légères (changement d’hélices notamment) mais également un petit espace de stockage pour les charges utiles transportées ainsi qu’une centrale informatique de guidage et de gestion du trafic aérien.
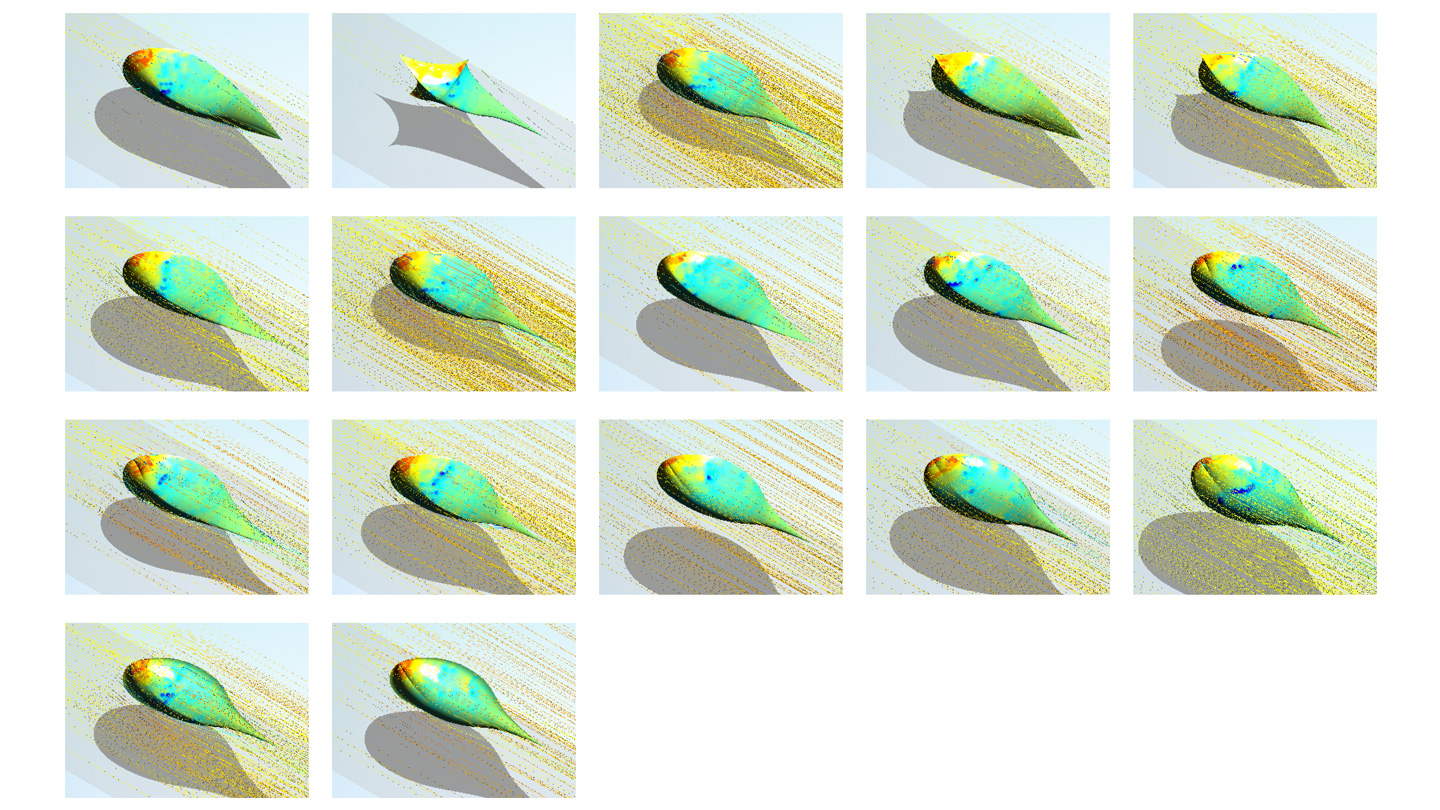
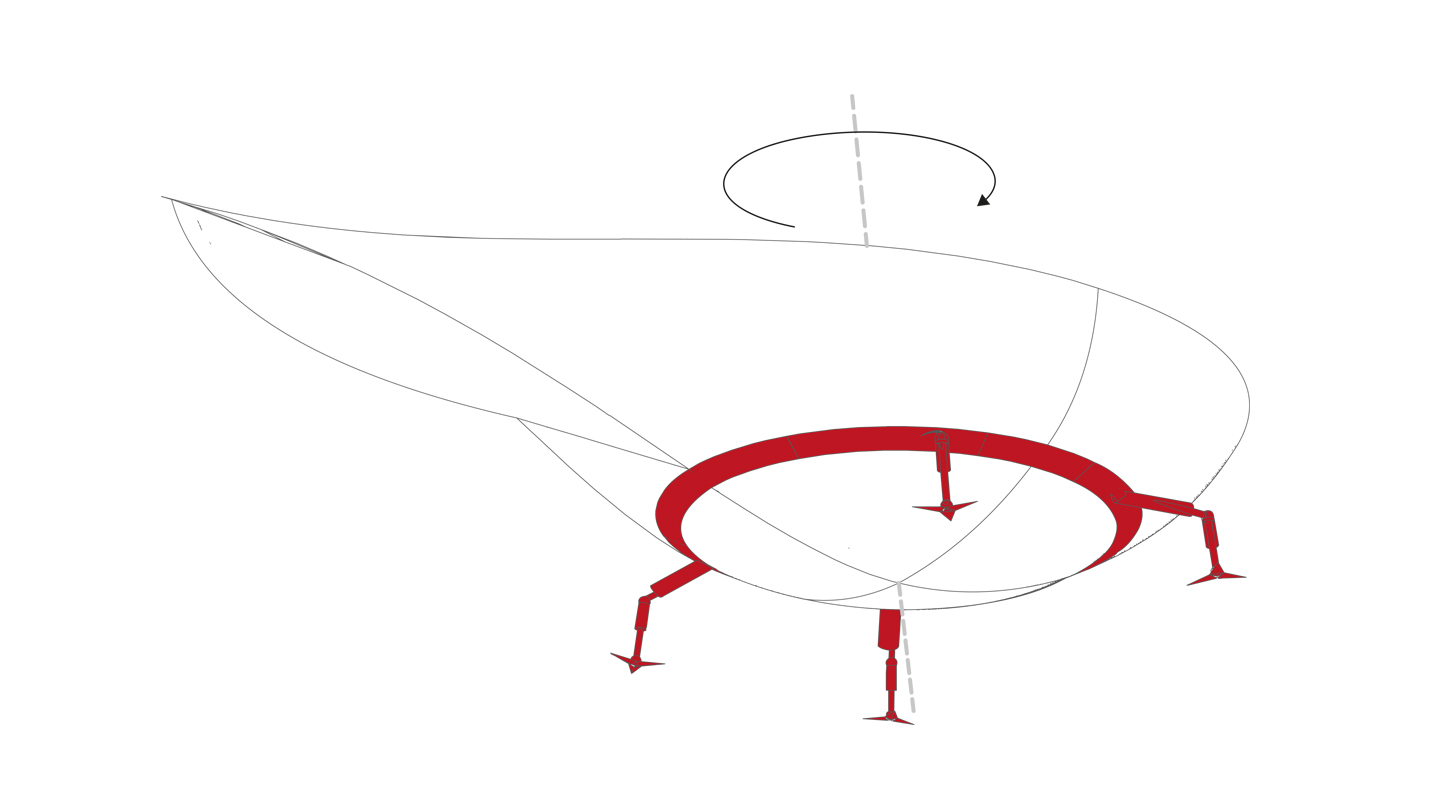
Du point de vue architectural, Dronepad prend la forme d’une structure en forme de goutte d’eau sur pilotis, répondant à un besoin technique précis : être capable de venir s’installer sur n’importe quel terrain sans mettre en place de fondations dites lourdes tout en offrant une surface horizontale. L’idée, est de travailler la morphologie afin d’augmenter et générer un appui suffisant. L’horizontalité et les liaisons au sol sont quant à elles assurées par quatre »jambes articulées » s’adaptant aux surfaces à l’aide de vérins et rotules et s’y accrochant à l’aide de crochets.
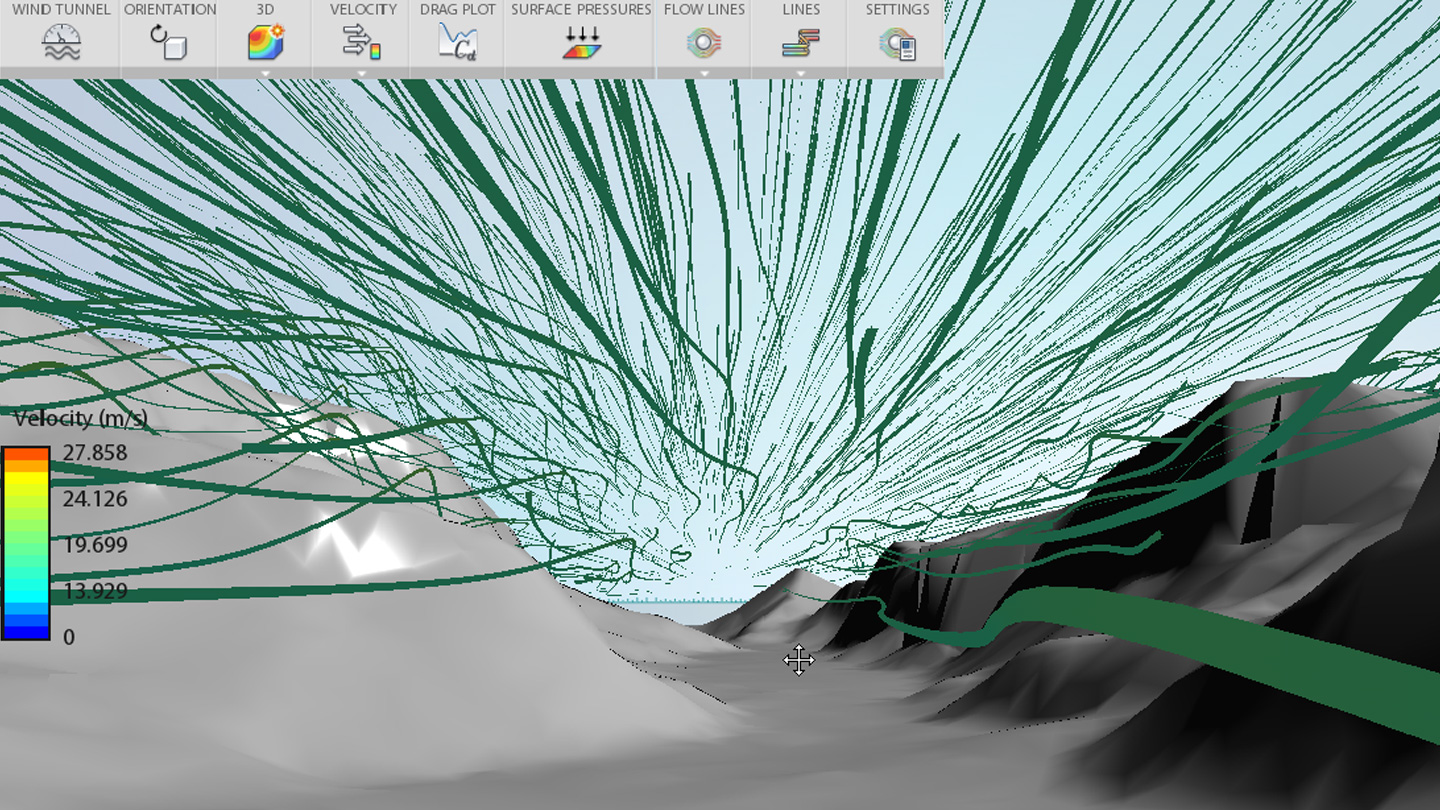
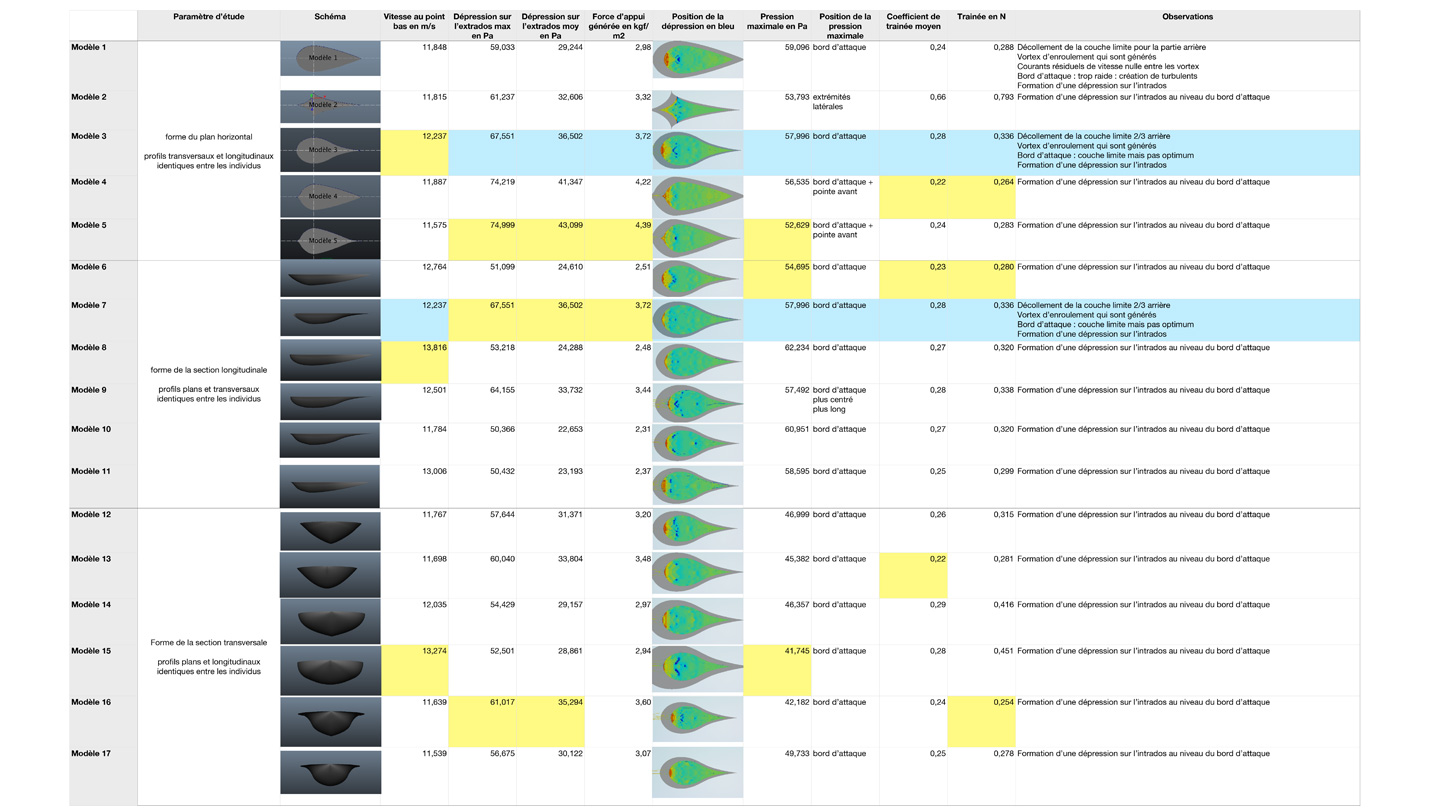
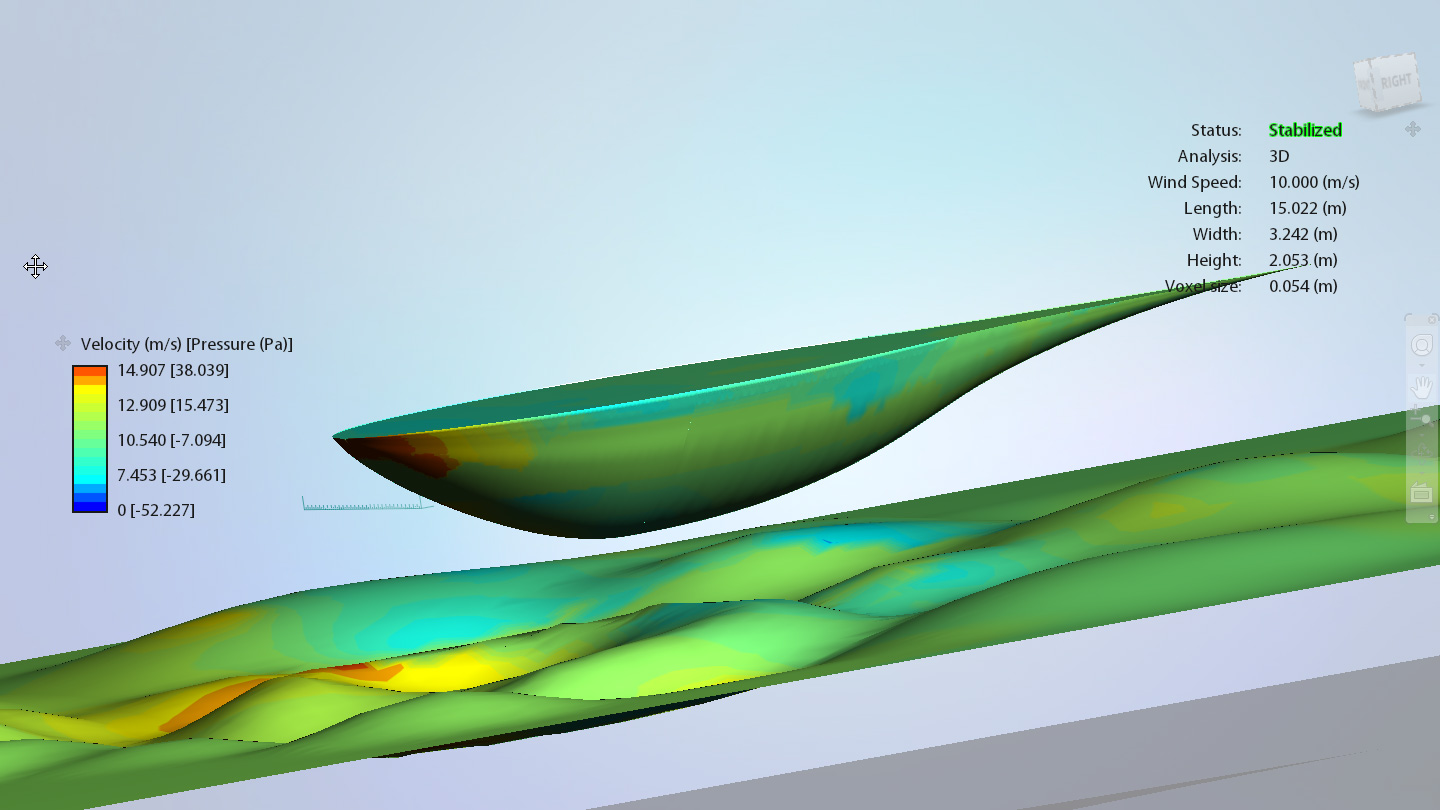
La morphologie est fortement inspirée de l’aviation et reprend le principe physique d’une aile d’avion, ici inversée pour créer une dépression entre Dronepad et le sol, »aspirant » ainsi la structure vers ce dernier et augmentant donc l’appui et la stabilité. Afin de parvenir à une forme optimale, de nombreux prototypes ont été modélisés puis testés informatiquement afin d’isoler les différents paramètres entrant en jeu. Il en résulte une augmentation d’environ 6% du poids de l’objet pour un vent modéré de 10 m/s. De plus cette morphologie augmentant la vitesse du vent en certains points, est également un moyen d’augmenter l’autonomie énergétique de Dronepad. En effet, la surface de l’extrados est recouverte de micro-éoliennes de 1.8mm de haut développées par l’université du Texas. Ainsi situées, elles se trouvent à l’abri des intempéries et profitent grâce à la morphologie d’une augmentation de la vitesse du vent d’environ 25%. Enfin, un empennage arrière vertical permet à la structure de toujours s’orienter face au vent, rendant optimal son augmentation d’appui, la production énergétique des micro-éoliennes ainsi que le décollage et l’approche des drones.